







































Vu de la bonne position dans l’espace, vous auriez du mal à penser que notre planète natale est autre chose qu’un monde aquatique. Et dans tous les domaines qui comptent, vous auriez raison ; il ne se passe presque rien sur la terre ferme qui ne soit influencé par les océans. Peu importe à quelle distance vous vous trouvez d’un océan, ce qui s’y passe compte vraiment.
Mais comment savoir ce qui se passe là-bas ? Après tout, les océans sont des vides sans traces et sont profondément inhospitaliers pour les mammifères terrestres comme nous. Ils ont également la réputation bien méritée de manger tout ce qui s’y aventure au mauvais moment et sans la chance d’un marin, et ils ont également tendance à être des endroits où les ressources qui font fonctionner notre société technologique moderne sont rares.
La collecte de données sur les océans n’est ni facile ni bon marché, mais elle est d’une importance cruciale pour tout, depuis la prévision du temps qu’il fera la semaine prochaine jusqu’à la compréhension de l’évolution globale du climat. Et cela nécessite une flotte de bouées de données, plus nombreuse que la plus grande marine mondiale et fonctionnant 24 heures sur 24, gardant une trace du vent, de la météo et des courants pour nous.
Historique des bouées de données
Compte tenu de l’importance des données océaniques, nous n’avons pu mesurer directement ce qui se passe là-bas que depuis très peu de temps. Hormis les observations depuis les navires en mer, qui remontent aux débuts des transmissions maritimes sans fil, les États-Unis ne déploient des bouées de données dédiées que depuis les années 1940. Les premières bouées étaient équipées d’instruments alimentés par batterie qui effectuaient uniquement les mesures les plus grossières et étaient souvent contrôlées par des mécanismes entraînés par une horloge qui rendaient nécessaires de fréquentes visites d’entretien. Les données étaient généralement transmises via des liaisons radio HF en utilisant le code Morse, de sorte que les rapports étaient soumis aux aléas des conditions ionosphériques et devaient être rassemblés manuellement.

Les années 1950 et 1960 ont vu des progrès rapides dans le domaine de l’électronique et les bouées ont commencé à être équipées de capteurs plus nombreux et plus performants. En outre, les améliorations apportées à la technologie des batteries et, finalement, à l’énergie solaire ont réduit le besoin d’appels de service fréquents, permettant ainsi de déployer des bouées plus au large. Les améliorations apportées aux matériaux, en particulier aux polymères, ont également rendu possibles des amarrages plus solides, ce qui a permis le déploiement de bouées dans des eaux de plus en plus profondes et a ouvert de vastes étendues de la surface de la Terre à une surveillance directe. Le développement de la technologie des satellites a également constitué une étape importante, non seulement en raison de leur capacité à collecter de manière fiable des données provenant de bouées lointaines, mais également en raison des images et de la télédétection qu’ils ont pu réaliser, fournissant ainsi un contexte précieux pour les données provenant des bouées.
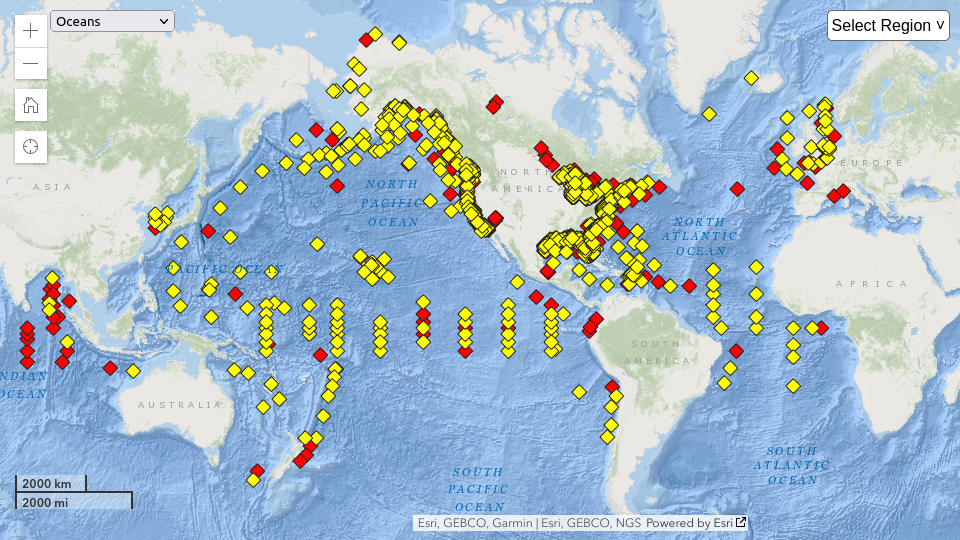
Le développement des systèmes nécessaires à la collecte et à l’analyse de leurs données, ainsi que la création d’organisations pour coordonner l’ensemble du processus, ont peut-être été encore plus importants que les améliorations technologiques apportées aux bouées météorologiques. Le développement des ordinateurs dans les années 60 et 70 a rendu le premier possible, tandis que la création de consortiums comme le National Data Buoy Center (NDBC) a couvert le second. Comme on pouvait s’y attendre, déployer un grand nombre de bouées dans certaines des eaux les plus profondes de la planète et les faire fonctionner est une entreprise coûteuse, les agences et institutions individuelles étant incapables de payer la facture d’un réseau complet. Chaque institution a donc tendance à posséder et à exploiter une petite flotte de bouées, qui font partie d’un vaste réseau où tous les membres partagent leurs données.
Types de bouées
S’il existe une description d’une bouée de données standard, c’est qu’il n’existe pas de bouée de données standard. Ce n’est pas tant que les bouées sont toutes des conceptions sur mesure ; il n’y a qu’un nombre limité de façons de construire quelque chose qui flottera de manière fiable au même endroit. Ce sont davantage les détails de l’endroit où la bouée sera déployée et les données qu’elle devra collecter qui détermineront à quoi ressemblera la chose et quel équipement sera chargé à bord.

Une bouée de données est évidemment loin d’être aussi compliquée que, par exemple, un porte-conteneurs ou une frégate navale. Mais il existe encore une architecture navale assez sophistiquée qui entre dans la conception des bouées de données. Les premières bouées étaient sujettes au chavirage, ce qui tend à nuire aux instruments montés sur leurs superstructures. Obtenir le bon mélange de forme de coque, d’emplacement et de quantité de ballast, de supports d’amarrage et de conception de superstructure est une danse délicate, compliquée par le fait que contrairement aux navires, les bouées de données ne peuvent pas manœuvrer pour éviter les intempéries ; en effet, leur objectif principal est de surmonter une tempête et de nous dire ce qui se passe.
Une conception courante pour les bouées de données est le type disque, avec des coques en forme de disque ou toroïdales. Les bouées NDBC vont de 3 mètres de diamètre à 12 mètres. Les bouées plus grandes de 10 et 12 m ont une coque en acier et doivent être remorquées jusqu’à leurs amarres et entretenues par des navires plus gros. Les bouées plus petites, telles que les bouées disque de 3 m et les bouées NOMAD à coque de bateau de 6 m, sont fabriquées en aluminium. Les bouées en aluminium présentent certains avantages par rapport à leurs cousines à coque en acier ; ils sont plus légers et peuvent donc être remorqués et entretenus par des navires plus petits, et ils ont tendance à moins interférer avec des instruments comme les boussoles et les magnétomètres. Ils résistent également mieux à la corrosion, un problème sérieux dans un environnement d’eau salée et dans les endroits où les déjections d’oiseaux marins s’accumulent. D’un autre côté, les bouées en aluminium ne sont pas aussi solides que les coques en acier, en particulier dans les voies de navigation ou là où les orques pourraient vouloir jouer avec des objets flottants.
Amarres
Quelle que soit la forme physique que prend la coque de la bouée, de nombreux travaux d’ingénierie maritime sont nécessaires pour garantir qu’il s’agit d’une plate-forme stable et fiable. La stabilité hydrodynamique est indispensable ; les bouées de données sont destinées à une navigation difficile et doivent rester verticales et en place sur leurs amarres. Les bouées sont généralement conçues pour être « rigides », ce qui signifie qu’elles auront une courte période de roulis dans une mer formée et qu’elles auront tendance à réagir très rapidement lorsque des forces externes les gèlent ou les font basculer d’un côté ou de l’autre. Un navire rigide a tendance à mieux surfer sur les vagues qu’un navire « tendre », et bien qu’il ne soit pas confortable pour les passagers, il fonctionne très bien pour une bouée de données. La flottabilité globale est également importante ; la bouée doit avoir suffisamment de réserve de flottabilité pour remonter à la surface si elle parvient d’une manière ou d’une autre à être submergée. Une flottabilité suffisante pour soulever les amarres et l’ancre du fond marin est également importante, au cas où la bouée serait accidentellement entraînée vers des eaux plus profondes à cause des courants, des tempêtes ou d’un accrochage sur un navire.
Les conditions au lieu d’amarrage doivent également être prises en compte ; ce qui fonctionne pour un endroit calme dans le golfe du Maine ne fonctionnera probablement pas pour les chaînes de bouées chevauchant le Pacifique équatorial pour surveiller les conditions El Niño. Bien qu’elles soient généralement signalées sur les cartes de navigation maritime, les bouées de données ne sont pas destinées à être utilisées pour la navigation, ce qui signifie qu’elles peuvent utiliser des amarrages plus lâches que les bouées strictement destinées à la navigation, qui ont un petit « cercle de surveillance » ou rayon de mouvement. La conception de l’amarrage doit également prendre en compte tous les capteurs qui pourraient devoir être installés le long des lignes d’amarrage, tels que la température de l’eau, la salinité ou le débit des courants océaniques.
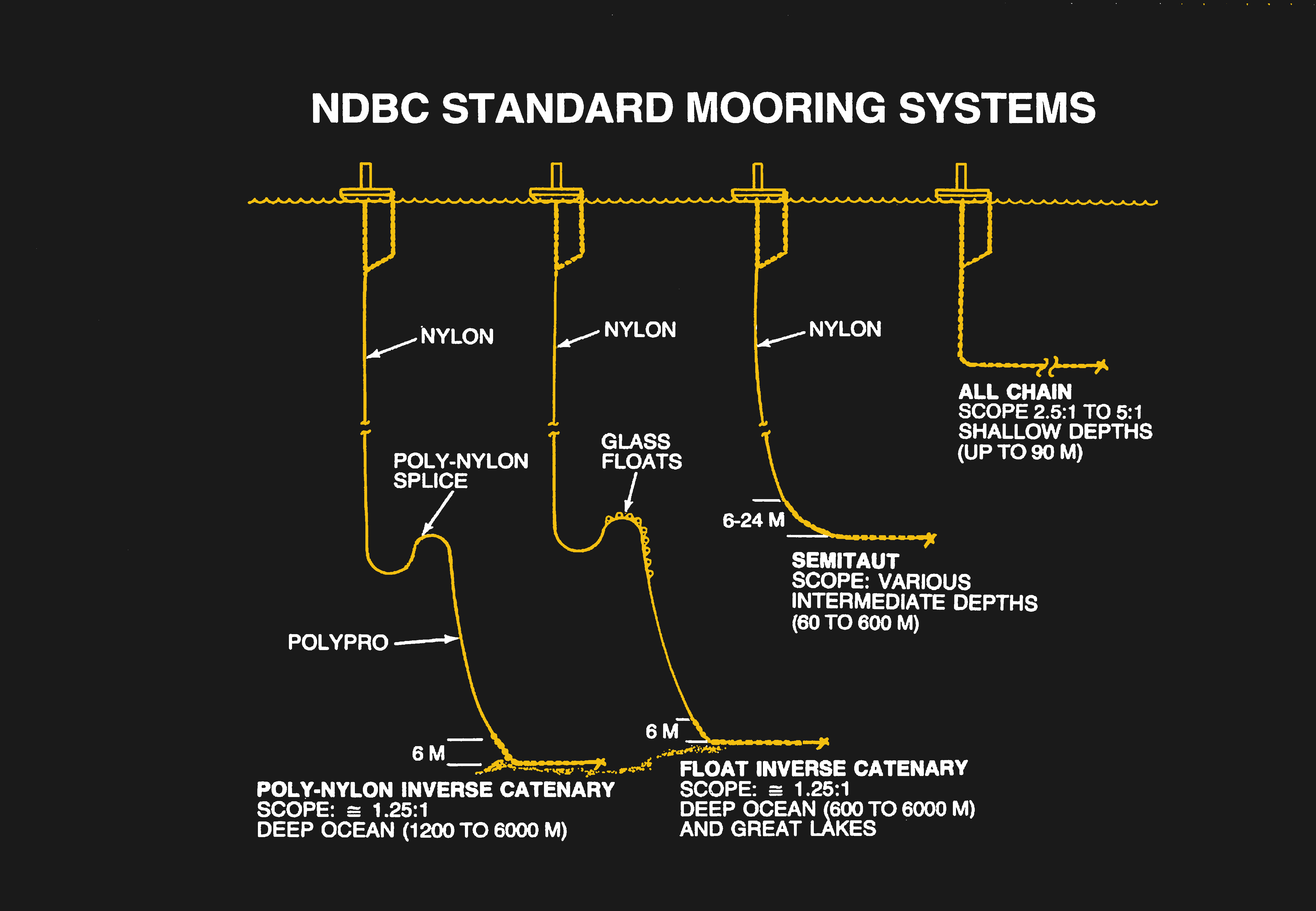
Pour amarrer ses bouées de données, NDBC utilise une combinaison de lignes à chaîne, en nylon et en polypropylène. Les amarres peu profondes sont toutes constituées de chaînes, tandis que les amarres plus profondes n’utilisent la chaîne qu’au fond. Les amarrages les plus profonds (certaines bouées de haute mer se trouvent dans 6 000 mètres d’eau) utilisent une conception de caténaire inversée, où la partie inférieure de l’amarrage flotte grâce à sa fabrication en polypropylène, moins dense que l’eau, ou en attachant des flotteurs au Ligne d’amarrage supérieure en nylon. Faire flotter l’amarrage central le maintient hors du fond marin, ce qui réduit les frottements sur les rochers. Tous les amarrages sont fixés à une ancre lourde. Pour les fonds rocheux, les ancrages sont généralement en béton ou en acier ; dans les années 1940, des ensembles de roues de wagons mis hors service étaient couramment utilisés. Pour les fonds marins sableux ou limoneux, des ancres de type douve plus traditionnelles peuvent être utilisées.
Instrumentation
La suite exacte d’instruments déployés sur une bouée de données dépend beaucoup de l’endroit où la bouée est déployée et des paramètres qui intéressent les océanographes et les climatologues. Mais il existe une suite de base que presque toutes les bouées arboreront, à la fois au-dessus et en dessous de la surface. Sur la superstructure de la bouée de données sera presque toujours monté l’assortiment standard d’instruments météorologiques : anémomètre, girouette, thermomètre, hygromètre, pluviomètre et baromètre, ainsi que les panneaux solaires nécessaires à l’alimentation des instruments, les antennes pour la transmission des données, et des aides à la navigation comme des réflecteurs radar et des balises. La superstructure comporte également généralement une grande girouette statique pour maintenir la bouée orientée face au vent.
À l’intérieur d’un puits résistant aux intempéries dans la coque se trouve la plupart des équipements d’enregistrement de données et de communication, ainsi que les batteries nécessaires pour alimenter la bouée lorsque le soleil ne brille pas – bien que certaines bouées plus grandes ayant des besoins en énergie plus importants soient équipées de générateurs alimentés. par des moteurs diesel marins. Outre les équipements de communication et d’alimentation électrique, le puits contiendra généralement des accéléromètres à cardan pour mesurer le soulèvement, le tangage et le roulis de la bouée ; ces mesures peuvent être utilisées pour déduire l’amplitude et la fréquence des vagues au mouillage. Des récepteurs GPS fixés aux antennes montées sur le mât sont également souvent inclus pour localiser et récupérer les bouées qui s’éloignent de leurs amarres.
Même si les choses peuvent paraître intéressantes à la surface, la plupart des opérateurs de bouées de données s’intéressent vivement à ce qui se passe dans l’eau, et les bouées sont donc pratiquement hérissées de capteurs. Les températures souterraines sont évidemment importantes, et les amarres contiennent souvent une douzaine de capteurs ou plus espacés le long de la ligne, pour mesurer les températures à différentes profondeurs. Des capteurs de salinité sont souvent inclus, tout comme des capteurs optiques pour mesurer la turbidité de l’eau et mesurer la pénétration de la lumière solaire.
Si les courants océaniques doivent être étudiés, un profileur acoustique de courant Doppler (ADCP) sera souvent attaché à la ligne d’amarrage. Un ADCP fonctionne en transmettant des ultrasons à haute fréquence (100 kHz ou plus) dans l’eau. Les particules en suspension dans la colonne d’eau de mer réfléchiront une partie de l’énergie acoustique, avec une fréquence décalée vers le haut ou vers le bas en fonction de la direction dans laquelle le courant les déplace. L’ADCP estime le courant en calculant le décalage Doppler, non seulement à une seule profondeur mais pour une colonne entière allant jusqu’à 1 000 mètres de long, en mesurant le temps nécessaire au retour de chaque réflexion.
Données
Les bouées de données génèrent une tonne de données, et les ramener à terre pour les utiliser peut s’avérer une tâche délicate, en particulier dans les zones où la couverture radio est inégale. Les bouées amarrées près du rivage peuvent transmettre leurs données via un simple modem cellulaire, tandis que les bouées plus éloignées dans l’océan doivent s’appuyer sur des satellites comme GOES pour envoyer leurs données. Quoi qu’il en soit, tous les capteurs d’une bouée de données sont connectés à un enregistreur de données, qui effectue le conditionnement du signal et la mise en file d’attente des données avant de les envoyer à terre. Dans la mesure où il existe une norme industrielle pour les enregistreurs de bouées de données, ce serait probablement Campbell Scientific ; de nombreuses bouées de données semblent les utiliser, et nous les avons déjà vues dans d’autres installations « à distance intéressantes », comme le réseau SNOTEL et dans la station météorologique au sommet du mont Everest.
La gestion des données à terre a tendance à être assez compliquée, compte tenu de la dispersion géographique des amarres et des multiples institutions impliquées dans leur entretien et leur maintenance. La plupart des opérateurs de bouées de données sont des universités ou des instituts de recherche océanographique, qui ont tendance à obtenir les premières informations. Ces groupes effectuent un traitement initial et une assurance qualité sur les données avant de les télécharger vers un ou plusieurs consortiums pour les développer en produits de données pour leurs clients.









{kind=link}