







































Lorsque l’on navigue dans les vastes étendues imprévisibles de l’espace extra-atmosphérique, en particulier sur les terrains extraterrestres des planètes lointaines, l’ingénierie intelligente est souvent à la base de chaque réalisation majeure. Un exemple frappant en est le système de suspension à bogie à bascule. Il fait partie intégrante des rovers martiens de la NASA et est devenu une caractéristique emblématique à part entière. Son succès a vu la conception adoptée par le programme spatial indien et par des milliers d’amateurs à leur tour.
Alors, qu’est-ce qui fait exactement de la suspension de bogie à bascule une solution de conception si convaincante ? Plongeons dans l’ingénierie qui rend ces merveilles à six roues si spéciales.
Rock Yo’ Bogies
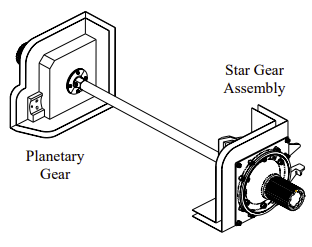
Ce qui est formidable avec la conception du bogie à bascule, c’est que la NASA n’a pas peur de partager ce qui la rend géniale. Une partie de la magie de la configuration des bogies à bascule réside dans sa simplicité. Cette conception innovante omet l’utilisation de ressorts ou d’amortisseurs. Imaginez plutôt une liaison mécanique impliquant des paires de bras, appelés « bascules », un de chaque côté du rover. Ceux-ci sont reliés par un pivot différentiel reliant les côtés gauche et droit entre eux. Les bascules ont une roue à une extrémité, et un « bogie » de deux roues pouvant pivoter par rapport à la bascule à l’autre extrémité. Cette disposition de base à six roues est tout ce qu’il y a dans le système de bogie à bascule.
L’avantage réside dans la capacité du différentiel à contrôler la façon dont le rover se positionne sur le terrain. En raison de l’action du différentiel entre les côtés gauche et droit du rover, lorsqu’un côté de la suspension est poussé vers le haut, le côté opposé est poussé vers le bas. Cela répartit naturellement la charge du véhicule sur les six roues, ce qui minimise la pression maximale au sol sur une roue. Ceci est particulièrement souhaitable lors de la traversée de terrains meubles, où une pression excessive au sol sur une roue peut conduire à son enfoncement dans le sol. L’action différentielle maintient également le véhicule relativement plat, le châssis conservant un angle égal à la moyenne des deux culbuteurs.
Un avantage majeur de cette conception est sa capacité remarquable à escalader des obstacles jusqu’à deux fois le diamètre de la roue tout en gardant les six roues au sol. Cette capacité permet aux rovers dûment équipés de gérer sans effort des rochers ou des fissures considérables sur un terrain accidenté, tout en réduisant les risques de rester coincé ou de perdre la traction. À l’approche d’un obstacle vertical, un véhicule à bogies à bascule appuie d’abord ses roues avant contre l’obstacle. Lorsque la roue avant tourne, elle soulève la roue jusqu’à l’obstacle, puis la franchit et se retourne. La roue du milieu fait ensuite de même, le bogie pivotant à son tour, avant que la roue arrière n’effectue le même trajet. La progression vers l’avant est lente lors d’une telle manœuvre, mais un rover à bogie à bascule peut se frayer un chemin régulièrement sur ces obstacles d’une manière totalement inconnue des autres modèles de véhicules.
Dans les conceptions de la NASA, il associe la suspension du bogie à bascule à des actionneurs à couple élevé dans les roues. Combiné à la capacité de la suspension à maintenir les six roues au sol dans la plupart des conditions, il fournit au rover suffisamment de force motrice pour se propulser vers l’avant, même sur les obstacles difficiles. Cela signifie également que si une ou deux roues sont surélevées ou se retrouvent dans une fosse sablonneuse, les autres peuvent compenser habilement, garantissant que le rover continue son voyage sans entrave. Dans le monde martien, implacable et imprévisible, cette qualité est inestimable, surtout lorsqu’un rover coincé pourrait équivaloir à la fin prématurée d’une mission.
La simplicité et la robustesse du système de bogie à bascule, sans ressorts ni amortisseurs, sont louables. Cette conception simple se traduit par moins de composants susceptibles de mal fonctionner, offrant ainsi une résilience parfaitement adaptée à l’environnement difficile de Mars. Avoir moins de pièces mécaniques susceptibles d’être obstruées par la poussière, la fatigue ou l’usure est un avantage considérable lorsque votre rover se trouve sur une autre planète, bien au-delà de toute aide à la maintenance.
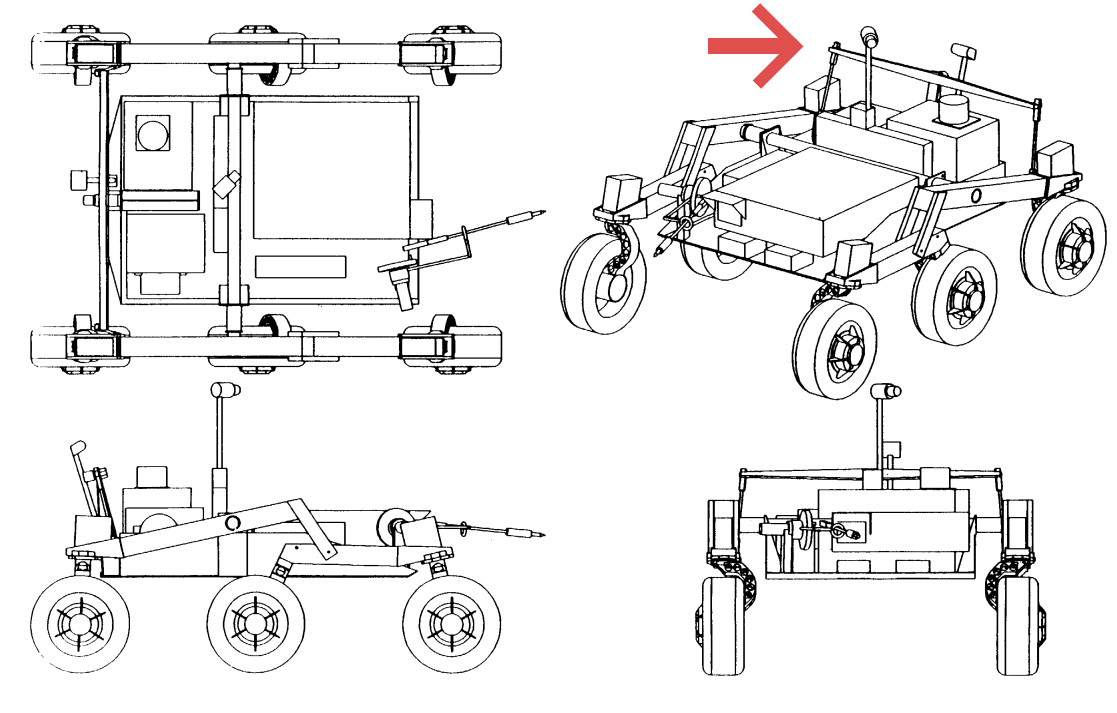
Le rover Sawppy de Roger Cheng utilise une conception de suspension à bogie à bascule. Ici, cela démontre la capacité de la suspension à franchir des obstacles élevés.
Le seul domaine dans lequel la conception du bogie à bascule n’excelle pas vraiment est celui de la vitesse. Le rover martien le plus rapide de la NASA est Perseverance, avec une vitesse de pointe d’environ 0,12 km/h. À titre indicatif, le rythme de marche est de 4 km/h, relativement fulgurant. La vitesse lente est quelque peu justifiée par le fait qu’il existe un énorme décalage temporel entre la Terre et Mars, ce qui rend les déplacements rapides difficiles à contrôler. Dans le même temps, la nature lente des rovers contribue à réduire la complexité mécanique. Plus un véhicule roule vite, plus les charges de choc sont importantes. La réduction des charges de choc en réduisant la vitesse réduit le besoin d’amortisseurs.

Le système culbuteur-bogie a été copié à plusieurs reprises, véritable témoignage de sa valeur technique. L’Organisation indienne de recherche spatiale (ISRO) a choisi ce même système de suspension pour son rover lunaire Pragyan, qui a atterri sur la Lune dans le cadre de la mission Chandrayaan-3. Le rover a habilement navigué sur la surface lunaire difficile sans incident majeur.
De même, de nombreux fabricants ont fait bon usage du design, le rover Sawppy de Roger Cheng étant un excellent exemple de cette forme. La conception démontre d’excellentes capacités à franchir les obstacles. Cela est dû au travail acharné de Roger pour construire une mise en œuvre appropriée de la conception du bogie à bascule, avec le lien différentiel crucial entre les deux côtés du rover. De nombreux constructeurs de rovers homebrew tentent de reproduire la conception à six roues, mais manquent cette fonctionnalité clé. C’est compréhensible, étant donné la complexité mécanique de mise en œuvre de la liaison différentielle, mais un mobile sans celle-ci perd à son tour certaines capacités.
(Note de l’éditeur : le jour où nous publions ceci, une nouvelle version du NASA-JPL Open Source Rover est arrivée dans notre boîte de réception ! Découvrez-la.)
Si vous travaillez dur dans un programme spatial gouvernemental ou privé et que vous avez besoin de construire un rover, considérez les avantages de la conception du bogie à bascule. Si vous allez dans un endroit mou, cahoteux, rocheux ou dangereux, cela pourrait être la solution dont vous avez besoin.









{kind=link}